Paper accepted at TMLR
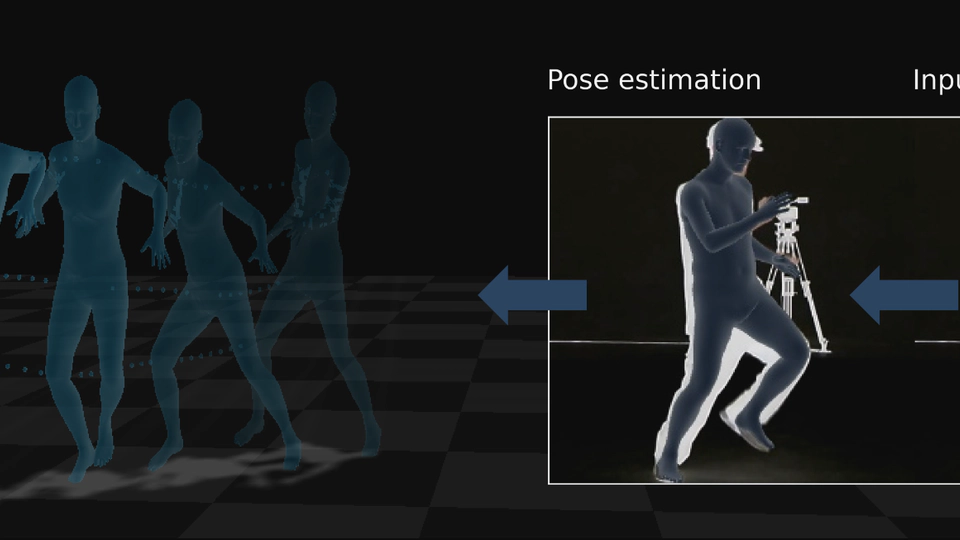
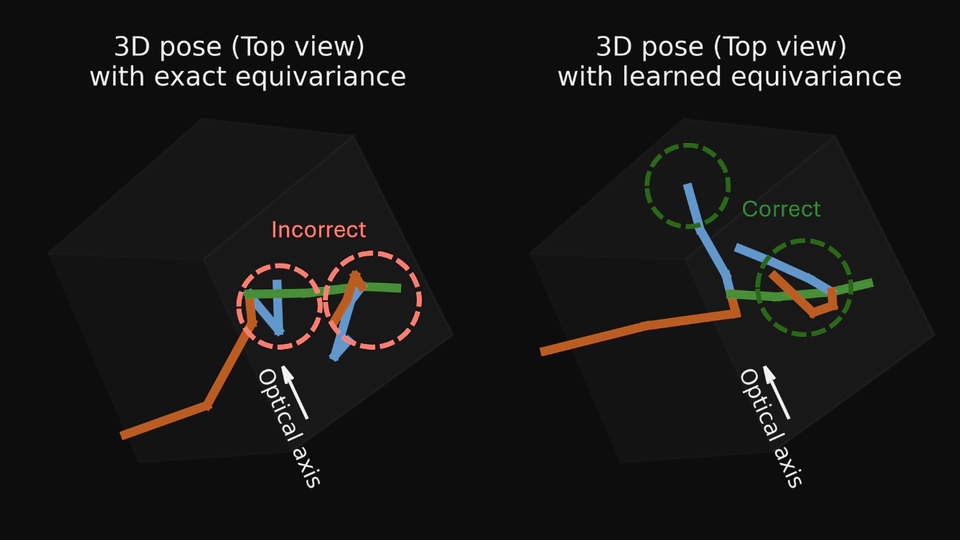
“Flow Matching for Probabilistic Monocular 3D Human Pose Estimation” has been published in Transactions on Machine Learning Research.
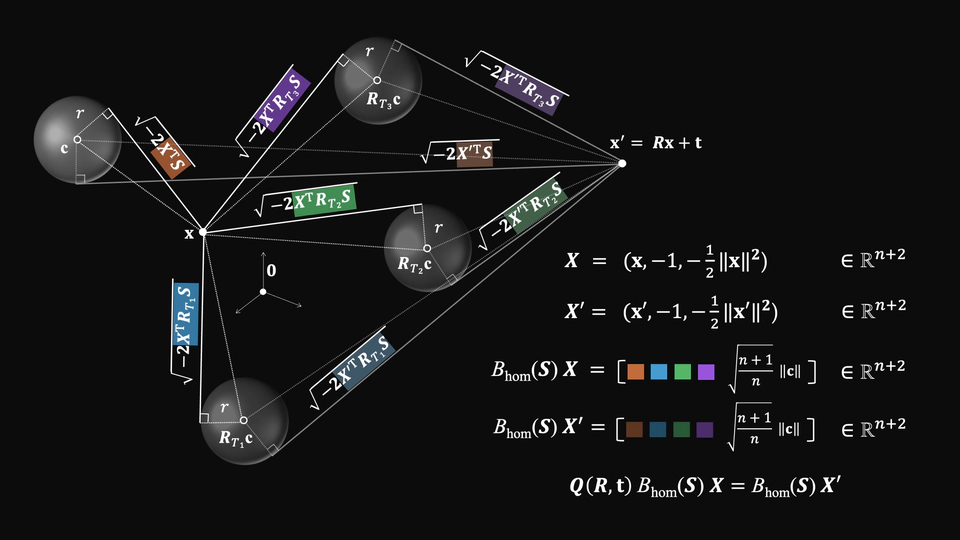
I study symmetry, structure, and equivariance in machine learning, developing geometric representations that bridge learning systems with the structure of the physical world.
I’m currently a postdoctoral researcher in the division of Computer Vision and Learning Systems, Linköping University, where I previously earned my PhD in Electrical Engineering with a specialisation in Computer Vision, focusing on Geometric Deep Learning. I was supervised by Michael Felsberg and funded by WASP. Further details can be found in my CV.
PhD Computer Vision
Linköping University, Sweden
MEng Computer Science and Technology
Hunan University, China
BSc Information Security Systems
DonNTU, Ukraine
“Flow Matching for Probabilistic Monocular 3D Human Pose Estimation” has been published in Transactions on Machine Learning Research.
“E$(n)$-Equivariant Spherical Decision Surfaces” has been accepted at ICLR 2026 Workshop on Geometry-grounded Representation Learning and Generative Modeling.
“QuaMo: Quaternion Motions for Vision-based 3D Human Kinematics Capture” has been accepted at ICLR'26.
I was delighted to be interviewed and featured in the WASP 10-year anniversary article series.
I had the honor of participating in the centuries-old tradition along with some extraordinary honorary doctors.