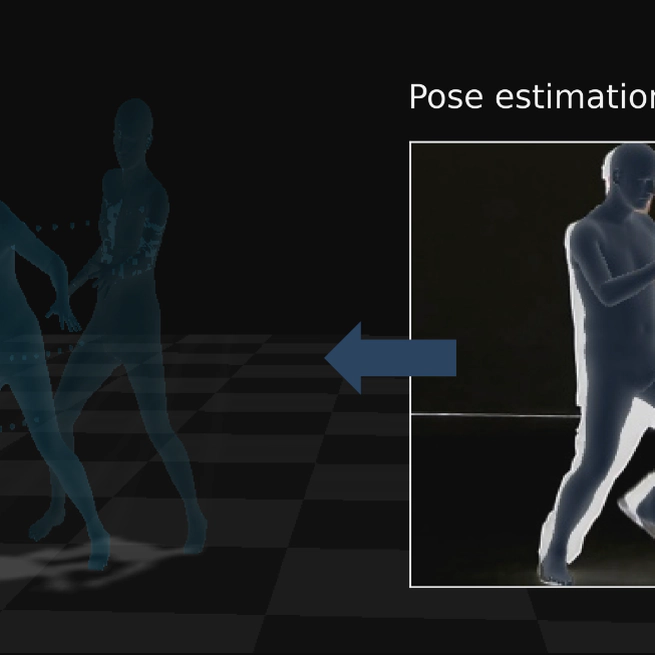
QuaMo: Quaternion Motions for Vision-based 3D Human Kinematics Capture
Vision-based 3D human motion capture from videos remains a challenge in computer vision. Traditional 3D pose estimation approaches often ignore the temporal consistency between frames, causing implausible and jittery motion. The emerging field of kinematics-based 3D motion capture addresses these issues by estimating the temporal transitioning between poses instead. A major drawback in current kinematics approaches is their reliance on Euler angles. Despite their simplicity, Euler angles suffer from discontinuity that leads to unstable motion reconstructions, especially in online settings where trajectory refinement is unavailable. Contrarily, quaternions have no discontinuity and can produce continuous transitions between poses. In this paper, we propose QuaMo, a novel Quaternion Motions method using quaternion differential equations (QDE) for human kinematics capture. We utilize the state-space model, an effective system for describing real-time kinematics estimations, with quaternion state and the QDE describing quaternion velocity. The corresponding angular acceleration are computed from a meta-PD controller with a novel acceleration enhancement that adaptively regulates the control signals as the human quickly change to new pose. Unlike previous work, our QDE is solved under the quaternion geometric constraints that results in more accurate estimations. Experimental results show that our novel formulation of the QDE with acceleration enhancement accurately estimates 3D human kinematics with no discontinuity and minimal implausible artifact. QuaMo outperforms comparable state-of-the-art methods on multiple datasets, namely Human3.6M, Fit3D, SportsPose and a subset of AIST. The code is available at https://github.com/cuongle1206/QuaMo.
Jan 26, 2026
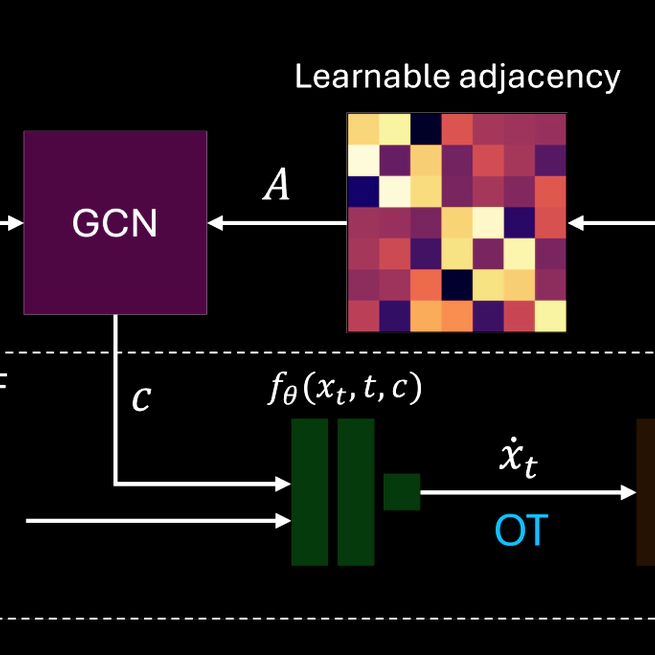
Flow Matching for Probabilistic Monocular 3D Human Pose Estimation
Recovering 3D human poses from a monocular camera view is a highly ill-posed problem due to the depth ambiguity. Earlier studies on 3D human pose lifting from 2D often contain incorrect-yet-overconfident 3D estimations. To mitigate the problem, emerging probabilistic approaches treat the 3D estimations as a distribution, taking into account the uncertainty measurement of the poses. Falling in a similar category, we proposed FMPose, a probabilistic 3D human pose estimation method based on the flow matching generative approach. Conditioned on the 2D cues, the flow matching scheme learns the optimal transport from a simple source distribution to the plausible 3D human pose distribution via continuous normalizing flows. The 2D lifting condition is modeled via graph convolutional networks, leveraging the learnable connections between human body joints as the graph structure for feature aggregation. Compared to diffusion-based methods, the FMPose with optimal transport produces faster and more accurate 3D pose generations. Experimental results show major improvements of our FMPose over current state-of-the-art methods on three common benchmarks for 3D human pose estimation, namely Human3.6M, MPI-INF-3DHP and 3DPW.
Jan 23, 2026
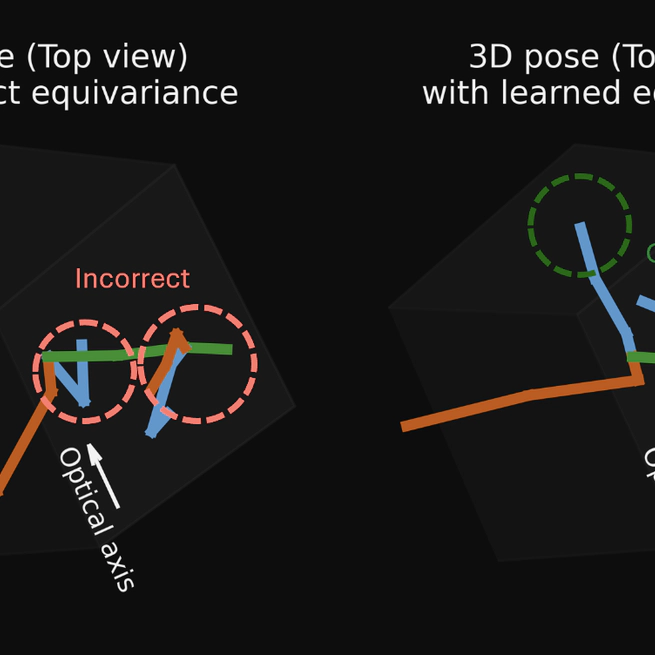
On the Role of Rotation Equivariance in Monocular 3D Human Pose Estimation
Estimating 3D from 2D is one of the central tasks in computer vision. In this work, we consider the monocular setting, i.e. single-view input, for 3D human pose estimation (HPE). Here, the task is to predict a 3D point set of human skeletal joints from a single 2D input image. While by definition this is an ill-posed problem, recent work has presented methods that solve it with up to several-centimetre error. Typically, these methods employ a two-step approach, where the first step is to detect the 2D skeletal joints in the input image, followed by the step of 2D-to-3D lifting. We find that common lifting models fail when encountering a rotated input. We argue that learning a single human pose along with its in-plane rotations is considerably easier and more geometrically grounded than directly learning a point-to-point mapping. Furthermore, our intuition is that endowing the model with the notion of rotation equivariance without explicitly constraining its parameter space should lead to a more straightforward learning process than one with equivariance by design. Utilising the common HPE benchmarks, we confirm that the 2D rotation equivariance per se improves the model performance on human poses akin to rotations in the image plane, and can be efficiently and straightforwardly learned by augmentation, outperforming state-of-the-art equivariant-by-design methods.
Jan 20, 2026